on
ubuntu 18.04에 gym_torcs(자율주행 강화학습 환경) 설치하고 테스트해보기
나는 어제 밤에 메일로 다음의 흥미로운 블로그 글 링크를 받았다. [Using Keras and Deep Deterministic Policy Gradient to play TORCS] 설명이 친절하다. 이론을 이해하기 전에 일단 실행해보고 싶다는 생각이 들어서 우분투를 새로 깔았다. 컴퓨터는 동아리 컴퓨터헤븐컴을 사용했다.
설치 환경
- x86-64 Intel Core i7
- ubuntu 18.04
$ sudo apt install git
$ sudo apt install gcc
$ sudo apt install g++
$ sudo apt install python2.7
$ sudo apt install python-pip
있는대로 다 설치했다
gym_torcs 설치
gym_torcs는 python gym을 이용해서 만든 자율주행 강화학습 환경이다.
gym_torcs repo 에 있는 vtorcs-RL-color/README.md 를 참고해서 아래와 같이 설치할 수 있었다.
$ git clone https://github.com/ugo-nama-kun/gym_torcs.git
$ cd gym_torcs/vtorcs-RL-color
$ sudo apt-get install libglib2.0-dev libgl1-mesa-dev libglu1-mesa-dev freeglut3-dev libplib-dev libopenal-dev libalut-dev libxi-dev libxmu-dev libxrender-dev libxrandr-dev libpng-dev
$ ./configure
위 스크립트는 링크의 README와 조금 다르다. 설치할 때 해당 링크에 써 있는 대로 libpng12-dev라고 작성하면 설치가 안 되는 문제가 있었다.
'libpng12-dev' 패키지는 설치할 수 있는 후보가 없습니다
위와 같은 에러 메세지였다. 검색을 통해 libpng-dev 로 설치해주면 된다는 것을 알았고, 위의 스크립트는 그것을 반영해 수정한 것이다.
그 후 다음의 명령어를 입력해 빌드를 시도해본다.
$ sudo make
그랬더니 다음과 같은 에러가 나타났다.
geometry.cpp:373:8: error: 'isnan' was not declared in this scope
이 문제는 isnan이 std 안에 정의되어있기 때문에 나타나는 에러이다. geometry.cpp를 디렉토리 안에서 검색해서 찾아 해당 줄을 수정해주면 된다. 검색해보면 경로는 gym_torcs/vtorcs-RL-color/src/drivers/olethros/geometry.cpp로 나온다. 편집기에서 isnan을 검색해 다음과 같은 줄을 찾는다.
if (isnan(r)) {
이 부분을 다음과 같이 수정해주고 저장한다.
if (std::isnan(r)) {
이렇게 한 뒤 $ sudo make를 입력했더니 에러 없이 진행되었다. 이어서
$ sudo make install
$ sudo make datainstall
이것들을 마저 입력해 설치를 끝낸다.
$ torcs
오류가 없었다면 터미널에 위와 같이 입력했을 때 게임 창이 뜨는 것을 볼 수 있다.
직접 게임하기
위처럼 설치한 뒤 뜨는 게임 창에서는 내가 직접 게임을 해볼 수 있는 것은 아니다. 이 환경은 강화학습을 위해 항상 통신을 기다리도록 되어 있는 것 같다. 만일 직접 torcs 게임을 해 보고 싶다면 강화학습 환경이 아니라 해당 게임을 설치하면 된다.
$ sudo apt install torcs
위 명령어는 인간 플레이어가 게임할 수 있는 torcs를 설치해준다. 설치 뒤 실행은 똑같이 $ torcs로 한다.
강화학습 환경과 사람용 게임을 동시에 설치하면 아마 충돌이 나겠지만 나는 그렇게 해 보지는 않았다…
DDPG-Keras-Torcs 로 학습시켜보기
앞서도 말했지만 나는 어떤 분이 이미 만들어 둔 프로젝트를 받아서 사용해 보기 위해 위와 같은 환경을 구축했다. 사용해보려는 코드는 자율주행 강화학습 네트웍을 Deep deterministic policy gradient를 이용한 방법으로 keras로 구현한 코드이다.
아까 그 블로그 글 쓰신 분이 그 글에 친절하게 사용법을 적어 주셨다. home 위치에서 다음 스크립트를 실행하면 된다.
$ git clone https://github.com/yanpanlau/DDPG-Keras-Torcs.git
$ cd DDPG-Keras-Torcs
$ cp *.* ~/gym_torcs
$ cd ~/gym_torcs
$ python ddpg.py
모듈 설치
역시 바로 실행은 안 된다. 에러 내용을 통해 무엇이 없는지 보고 다음과 같이 설치해주었다.
$ pip install gym
$ pip install keras==1.1.0
$ pip install tensorflow==0.12rc0
그리고 실행…해 봤는데도 안 되어서 다음을 설치했다. autostart.sh 에서 사용하는 xte 명령어가 없어서 실행되지 않았던 것이었다.
$ sudo apt install xautomation
그리고 뉴럴 네트웍을 학습시키기 위해 글에 써 있는 대로 ddpg.py를 편집기로 열어 train_indicator=1로 수정했다. 이제 $ python ddpg.py를 입력하면 뭔가 된다.
결과
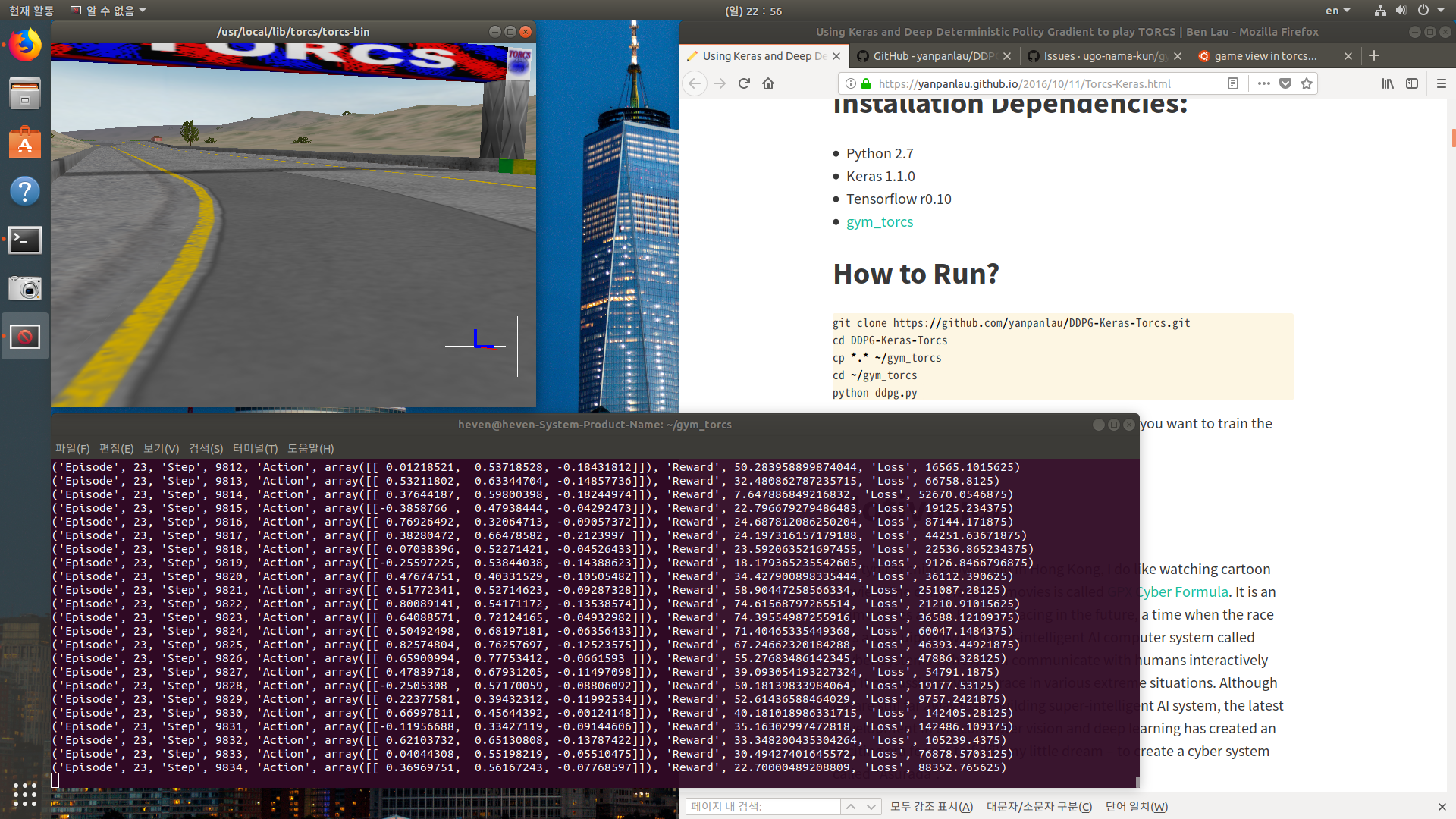
학습 코드를 실행시켰는데 게임 창에서 자동차가 보이지 않는 문제가 있었다. 해결할 힘이 없다… 주행 중 F1을 누르면 키 힌트를 볼 수 있고, F2 키가 드라이버 시점 카메라이다. 드라이버 시점으로 보면 자동차가 얼마나 이상하게 가고 있는지 잘 볼 수 있다. 그래도 나보다는 운전 잘 하는 것 같다 에피소드는 기본 코드에는 2000번 학습하도록 되어 있다. 오래 걸린다.
후기
사실 생각보다 삽질을 조금 많이 했다. 중간에 gpu 써보겠다고 (괜히 헤븐컴 쓰는 게 아니었다) CUDA 설치 시도했던 게 제일 시간을 많이 잡아먹었다. 서로 다른 두 방법으로 했는데도 계속 의존성 문제가 생겨서 우분투를 두 번 새로 깔았다. 결국 CUDA는 설치 못 하고 그냥 cpu로 돌려보았다. 이 정도 삽질 했으니 이제 그냥 머신러닝이랑 강화학습 이론 공부를 해야겠다.